-
单元液压支架
搬运机器人
HANDLING
ROBOT
- ≤ 10 t整机重量
- ≥ 6200mm内转弯半径
- 25 MPa工作压力
-
产品优点
◇ 机器人宽度1.0m-1.2m,窄型设计,满足两边布置、中间布置等多种单元支架布置方式的搬运;
◇ 机器人采用前后履带、中间下沉式支架托运方式,降低了车身中心,提高了搬运的稳定性;
◇ 机器人通过高精度电液联动闭环控制,保障了单元支架插装过程的效率和稳定性;
◇ 机器人通过高精度电液比例悬挂动态调节技术,实现了运动过程中车身的平衡;
◇ 机器人通过电缆收放与车身运动速度自动同步技术,实现了运动过程中的电缆的自动收放和排线;
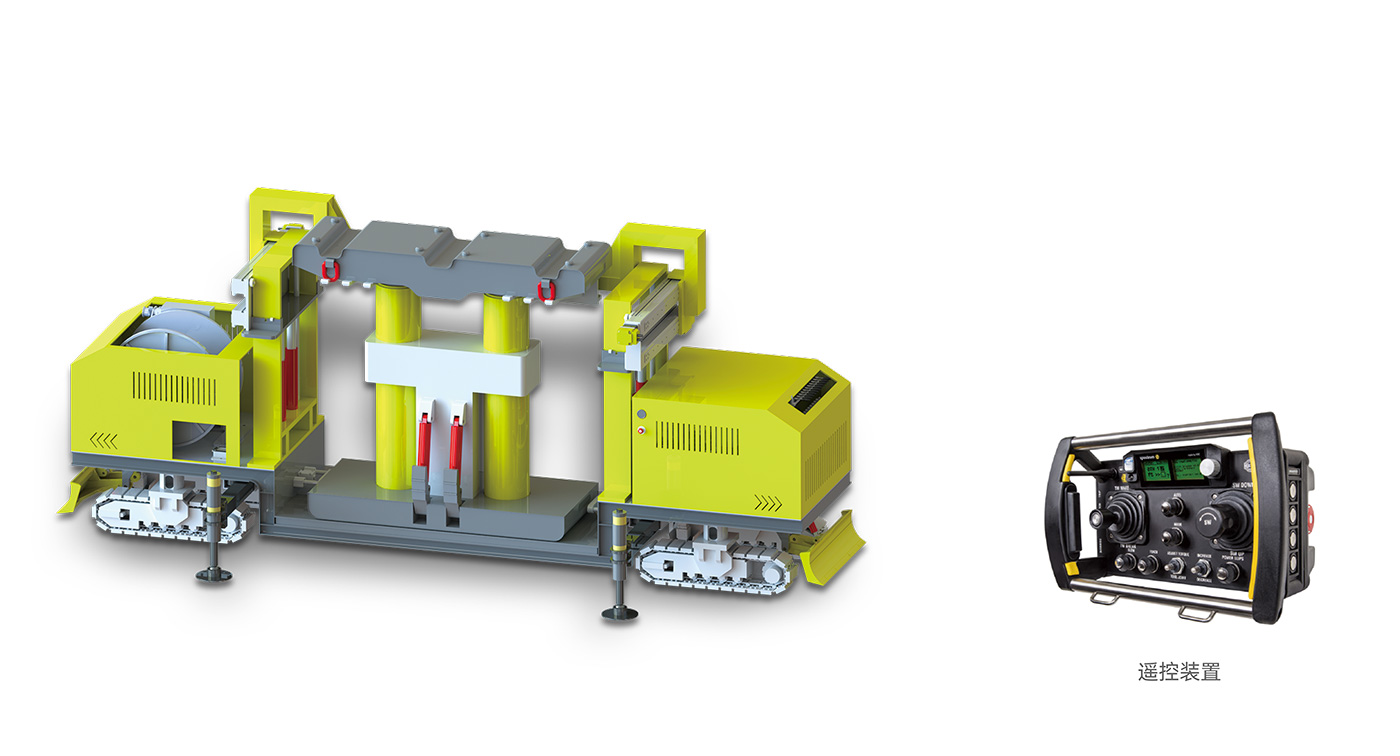
◇ 无线遥控器最大遥控距离200 米,可独立控制履带运动、支腿升降、插装臂运动,可读取机器人状态,设置参数和急停。
产品参数
|
项目名称
|
单位
|
技术指标
|
|
整机外型尺寸(L×W×H)
|
mm
|
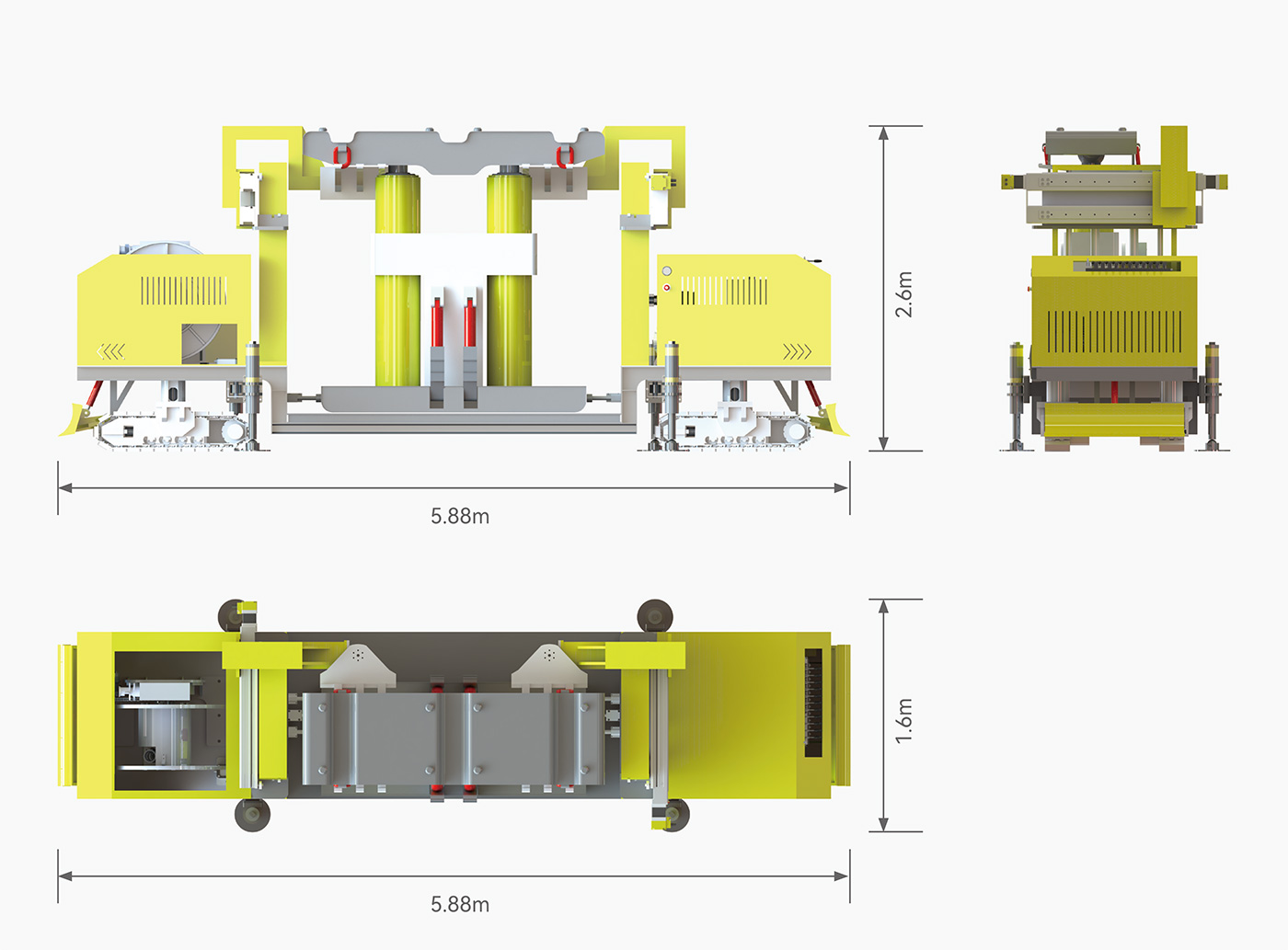
5880×1600×2600
|
|
整机重量
|
t
|
≤ 12
|
|
驱动功率
|
KW
|
≥ 22
|
|
额定载荷
|
t
|
≤ 7
|
|
内转弯半径
|
mm
|
≥ 6200
|
|
爬坡角度
|
°
|
0~18°
|
|
遥控距离
|
m
|
0~200
|
|
行走方式
|
|
液压驱动,履带行走
|
|
行走速度
|
m/min
|
20
|
|
工作压力
|
MPa
|
25
|
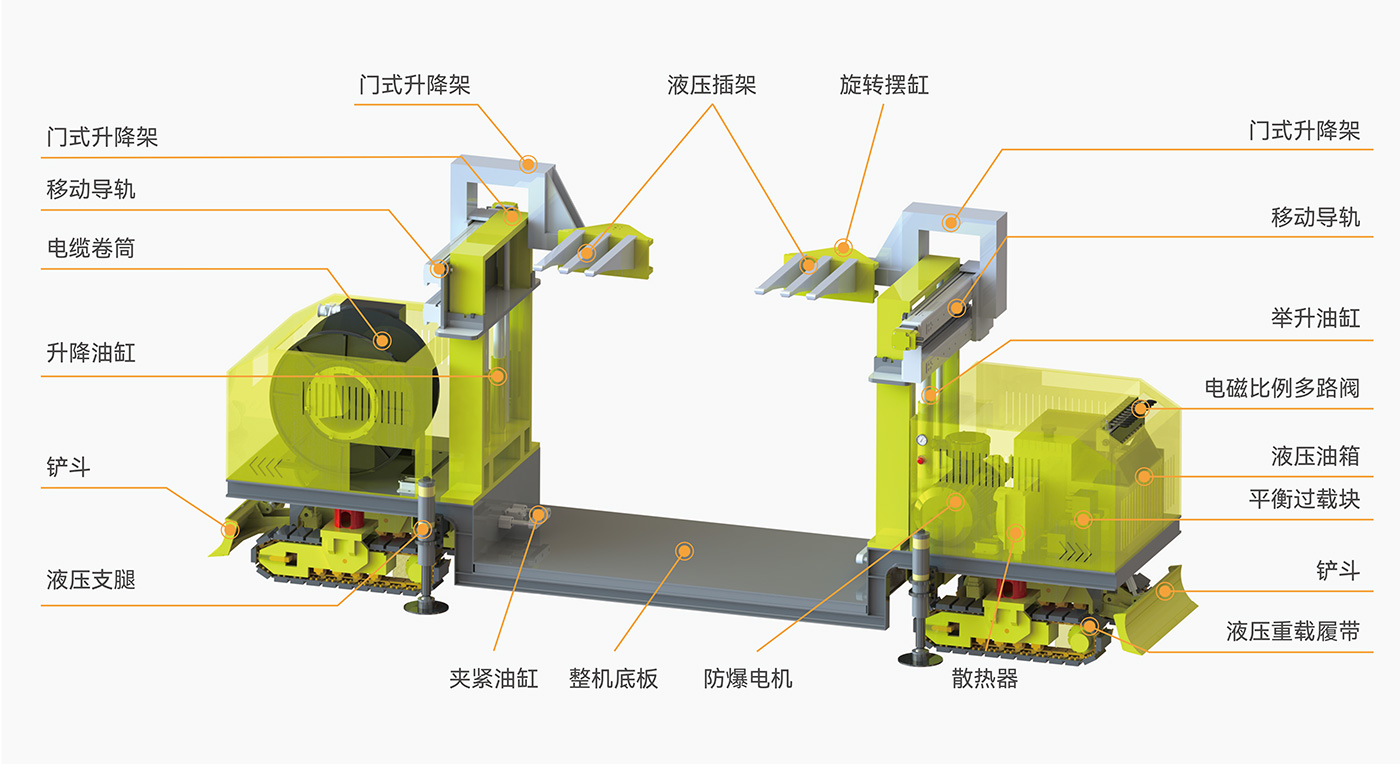
产品结构图
外形尺寸图